
Suivre des animaux dans un labyrinthe sous-marin – Methods Blog

Message fourni par Edward Lavender
Patiner dans les profondeurs
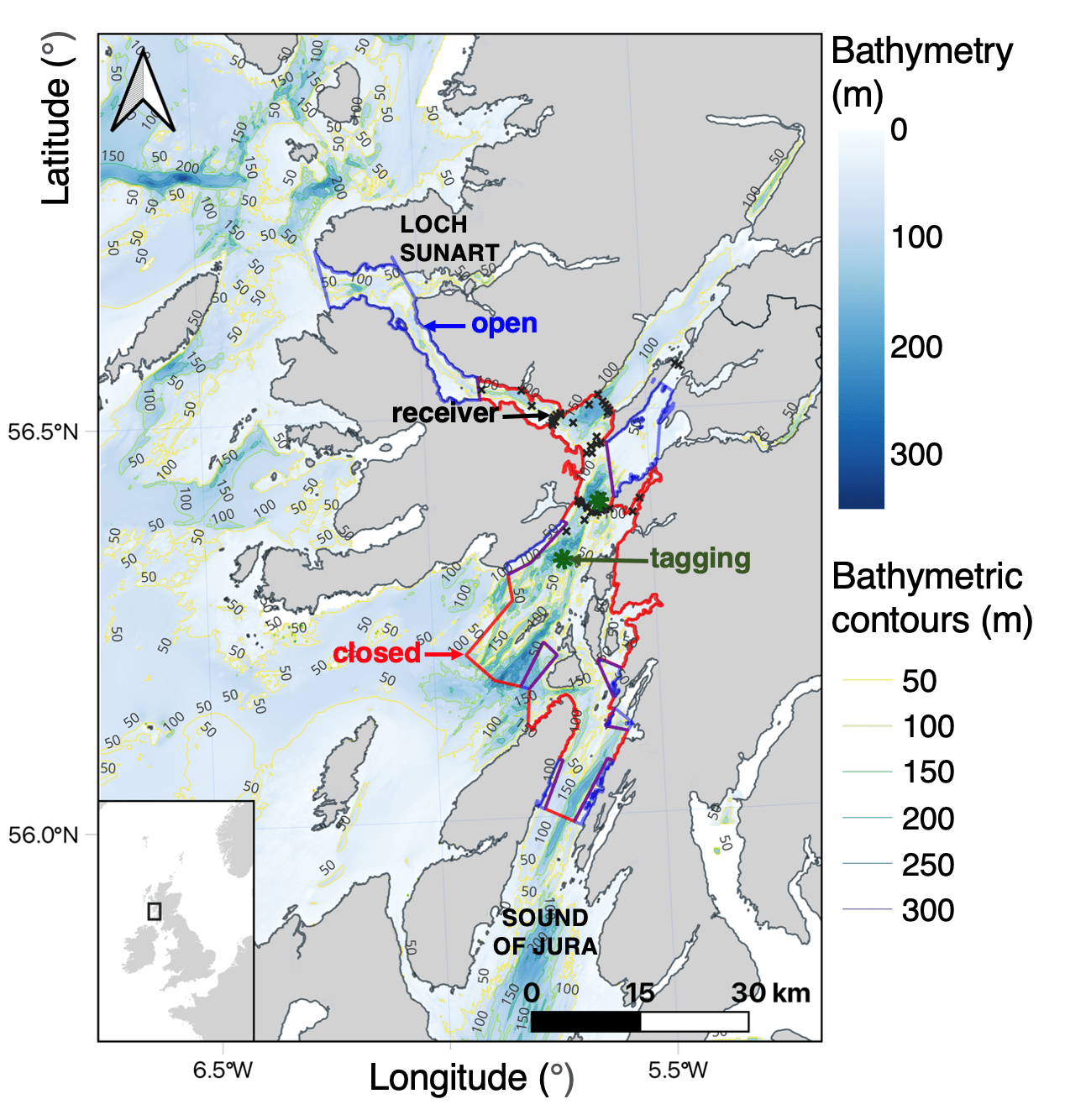
Il y a dix ans, le Écologie du mouvement du skate à clapet un projet a été créé pour suivre le skate à clapet (Un plongeon intermédiaire) en Ecosse. La raie à clapet est un grand animal benthique aplati, avec un dessous pâle et une coloration gris-brun tachetée sur le dessus. Mesurant plus de deux mètres de long, ils parcourent les fonds marins jusqu’à des profondeurs de 1 200 m. On pense qu’ils pourraient vivre plus de 40 ans. Autrefois largement répandus, ils ont été fortement touchés par la pêche commerciale et sont aujourd’hui en danger critique d’extinction.

En 2016, une zone marine protégée écossaise a été désignée pour la raie à clapet et le projet Movement Ecology of Flapper Skate a été chargé d’étudier les mouvements des raies dans la région. J’étais alors doctorant. Les raies ont été capturées et marquées avec des enregistreurs de profondeur et des émetteurs acoustiques, programmés pour transmettre des pings spécifiques à chaque individu pouvant être détectés par des récepteurs sous-marins. Ces données ont soutenu une décennie de travail sur mouvement de patinage, utilisation en profondeur, activité verticale, comportement et océanographie. Cependant, la reconstruction de trajectoires de mouvement détaillées restait un problème ouvert.
Du marquage à la modélisation
Lors d’un postdoc à N’hésitez pasj’ai commencé à réfléchir davantage au problème de la géolocalisation des animaux dans une perspective de modélisation état-espace. Dans un modèle espace-états, vous modélisez les mouvements de l’animal et le processus de mesure qui relie ses emplacements (inconnus) aux observations. En ajustant le modèle aux données, vous pouvez estimer la localisation de l’animal dans le temps. Mais c’est là que réside le principal défi statistique.
Traquer les animaux avec des particules
Il existe différentes manières d’ajuster les modèles d’espace d’état, mais elles n’ont pas été largement appliquées aux systèmes de télémétrie acoustique. Une approche nous avons développé récemment est le filtrage et le lissage des particules. L’idée clé, développée dans un autre Blog des méthodesconsiste à représenter de manière probabiliste les emplacements inconnus de l’animal avec un nuage de « particules ». Vous simulez de manière récursive le mouvement des particules et attribuez des poids à l’aide des données : les particules qui se déplacent d’une manière qui s’aligne sur les données sont fortement pondérées ; les autres ont un poids inférieur. À tout moment, la collection de particules pondérées forme une carte thermique se rapprochant de notre distribution de probabilité pour l’emplacement de l’animal. Si cette approche vous intéresse, consultez notre crépiter emballer. C’est puissantmais affectées par la dégénérescence des particules : notamment pour les espèces benthiques vivant dans des environnements accidentés, de nombreuses particules se déplacent de manière incompatible avec les observations (en profondeur), réduisant la qualité de l’approximation. C’est un problème difficile pour les méthodes d’échantillonnage en général.

Passer des particules à une grille
Une solution consiste à représenter la zone d’étude sous forme de grille et à calculer la probabilité que l’animal se trouve dans chaque cellule, en tenant compte des mouvements et des observations. Puisque nous calculons des probabilités partout, et pas seulement aux emplacements occupés par un nombre fini de particules, la dégénérescence des particules est évitée. L’approche a été établie par Uffe Thygesen et collèguesmais n’a pas été largement utilisé dans les systèmes de télémétrie acoustique en l’absence de logiciels efficaces et conviviaux.
Nager plus vite avec Wahoo.jl
Atténuer ce défi, notre nouveau journal présente le Wahoo.jl emballer. L’innovation clé dans Wahoo.jl consiste à représenter l’étape du mouvement via une opération de convolution qui s’exécute sur l’unité de traitement graphique (GPU) d’un ordinateur. Cette étape « brouille » les probabilités dans chaque cellule en balayant une matrice de transition codant le comportement de mouvement de l’animal sur la grille. Le même genre de chose se produit lorsque vous appliquez une image à l’aérographe sur votre téléphone et des algorithmes incroyablement rapides ont été développés pour cette opération et s’exécutent sur le GPU. Il s’agit d’un type particulier de puce informatique comportant des milliers de threads capables de gérer simultanément de nombreuses tâches simples et répétitives. L’exploitation de cette technologie pour la convolution permet d’accélérer considérablement, ouvrant de nouvelles opportunités pour analyser de grands ensembles de données du monde réel.
Revenir au début
Pour le suivi des animaux benthiques, Wahoo.jl nous permet d’exploiter pleinement les observations de profondeur et la connaissance de la bathymétrie, ainsi que les observations acoustiques, à des fins d’inférence, conduisant à des trajectoires de mouvement incroyablement précises. Nous utilisons désormais cette approche pour analyser les mouvements des patins à clapet avec des détails sans précédent.

Tendre la main et regarder vers l’avenir
Pour utiliser Wahoo.jl, accédez à GitHub. Contactez-nous avec commentaires ou questions. Nous espérons que ce paquet sera utile, mais ce n’est pas une solution miracle. Pour un aperçu des approches alternatives qui font différents compromis, consultez notre revoir.
Remerciements
Le projet Movement Ecology of Flapper Skate a été créé par James Thorburn. Mon doctorat (2018-22) a été supervisé par James Thorburn, Sophie Smout, Janine Illian, Mark James et Peter Wright, avec le soutien de Jane Dodd et Dmitry Aleynik. Mon postdoc à l’Eawag (2023-205) a été supervisé par Helen Moor et Carlo Albert et soutenu par Andreas Scheidegger.