


Tout au long du mois de mars, nous présentons articles présélectionnés pour le prix Robert May 2025. Le Prix Robert May est récompensé chaque année par la British Ecological Society pour le meilleur article sur les méthodes en écologie et évolution rédigé par un auteur en début de carrière. L’article de Kal Backman ‘Apprentissage profond inspiré par l’homme pour localiser et classer les animaux terrestres et arboricoles lors d’enquêtes thermiques par drones » fait partie des finalistes pour ce prix.
À propos du papier
Quel est le sujet de votre article présélectionné et à quoi cherchez-vous à répondre avec votre recherche ?
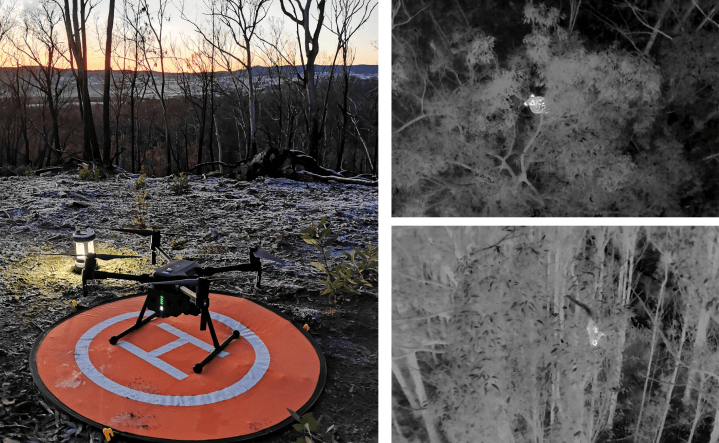
Notre travail s’est concentré sur l’extraction d’observations d’animaux à partir de grands volumes de données vidéo thermiques de drones (d’une valeur de 14 millions d’images !) pour une utilisation dans la modélisation de l’abondance et la détection d’espèces protégées.
Contrairement aux modèles de détection animale antérieurs, nous nous sommes inspirés de la façon dont les pilotes humains ont résolu la tâche et avons intégré ces techniques dans notre modèle.
Nous avons également entrepris de remédier à la principale barrière à l’entrée qui empêche les écologistes de former leurs propres modèles d’apprentissage en profondeur, à savoir la nécessité de disposer de grands volumes de données de formation étiquetées manuellement. Nous avons résolu ce problème en créant un moteur de simulation d’image thermique réaliste pour générer et annoter de manière autonome les données d’entraînement.


Avez-vous été surpris par quelque chose en travaillant dessus ? Avez-vous eu des défis à surmonter ?
L’un des plus grands défis consistait à développer un pipeline de rendu d’images thermiques suffisamment réaliste pour que les connaissances acquises grâce à la simulation puissent être transférées à de véritables images thermiques de drones.
Mais relever ce défi a porté ses fruits puisque nous avons été étonnés de voir les résultats du premier modèle intégrant des données simulées. Les prédictions initiales du modèle souffraient de cadres de délimitation instables et temporellement incohérents en raison d’erreurs et de qualités variables de la part des annotateurs humains. L’inclusion de données simulées a permis au modèle de générer des cadres de délimitation cohérents, ce qui a facilité considérablement l’annotation des données futures.


Quelle sera la prochaine étape dans ce domaine ?
La prochaine étape dans ce domaine consiste à intégrer de tels modèles de détection d’animaux en vol pour une détection et une inspection automatisées des animaux, permettant aux pilotes de superviser plusieurs drones pour une plus grande couverture de la zone d’enquête.
En ce qui concerne la prochaine étape de la génération de données simulées, il est essentiel de réduire davantage l’écart entre la simulation et la réalité afin de minimiser la dépendance à l’égard de données réelles pour la surveillance des espèces insaisissables et de réduire le coût en ressources humaines de l’annotation des données afin que les écologistes puissent mieux consacrer leur temps à conduire des changements politiques et à en tirer des informations écologiques.


Quels sont les impacts ou implications plus larges de votre recherche sur les politiques ou la pratique ?
Notre modèle permet la détection d’observations d’animaux sur de grandes quantités d’images de drones thermiques, ce qui est essentiel au développement de modèles d’abondance qui guident la prise de décision en matière de conservation. Mais plus important encore, les alertes d’observation d’espèces protégées aident à établir des zones protégées, empêchant ainsi la déforestation de ces régions critiques pour la biodiversité.
À propos de l’auteur
Comment en êtes-vous arrivé à l’écologie ?
Mon doctorat s’est concentré sur l’interaction homme-robot, sur la manière dont les humains et l’intelligence artificielle peuvent travailler ensemble pour accomplir des missions difficiles liées aux drones. Cela m’a amené à travailler au sein du Département du changement climatique, de l’énergie, de l’environnement et de l’eau de la Nouvelle-Galles du Sud, où j’ai utilisé mes compétences acquises lors de mon doctorat dans des contextes écologiques pour développer des systèmes permettant d’aider les pilotes à réaliser des enquêtes par drone et à tirer des enseignements des données collectées.


Quel est votre poste actuel ?
Je continue de travailler avec le Département du changement climatique, de l’énergie, de l’environnement et de l’eau de la Nouvelle-Galles du Sud sur de nouveaux projets passionnants visant à fournir des informations et des outils pour informer les décideurs politiques sur l’évolution des conditions environnementales dans tout l’État de Nouvelle-Galles du Sud, en Australie.
Je travaille également comme ingénieur de recherche à l’Université Monash, ce qui me permet d’explorer des sujets de recherche tels que les transports durables, l’interaction homme-robot, le raisonnement neuro-symbolique et la simulation de l’environnement.


Avez-vous poursuivi les recherches sur lesquelles porte votre article ?
Nous avons développé le modèle et l’avons déployé sur des appareils de pointe pour fournir une assistance sur le terrain en temps réel aux pilotes et continuer à soutenir ce programme.
Cependant, notre attention s’est déplacée vers la lutte contre les principaux facteurs de perte de biodiversité grâce à la cartographie des changements d’affectation des terres et de l’étendue de la végétation à l’aide d’images de télédétection.


Quel conseil donneriez-vous à quelqu’un dans votre domaine ?
N’abandonnez jamais l’exploration des concepts et des sujets que vous aimez. Une bonne recherche crée plus de questions que de réponses, ce qui oriente l’orientation future de la recherche et conduit à de nouvelles opportunités surprenantes qui étaient auparavant inimaginables.